
I’m a fourth-year Ph.D. student majoring in Computer Science at School of Computer Science, Fudan University, Shanghai, China.
Currently, I'm working as an intern in Tencent Robotics X.
I am advised by Prof.Xiangyang Xue and co-advised by Prof.Yanwei Fu and Prof.Taiping Zeng.
Prior to this, I received my bachelor’s degree in School of Computer Science from Tianjin University in June 2021.
I'm presently working on Robotics, Scene Representation, and 3D Computer Vision. Previously, I worked on perception and simultaneous localization and mapping for autonomous driving.
Email: jwhou23@m.fudan.edu.cn
Publications
equal contribution, *: co-corresponding author
 TaMMa: Target-driven Multi-subscene Mobile Manipulation
TaMMa: Target-driven Multi-subscene Mobile Manipulation
Jiawei Hou, Tianyu Wang, Tongying Pan, Shouyan Wang, Xiangyang Xue, Yanwei Fu.
CoRL, 2024
Webpage •
Paper
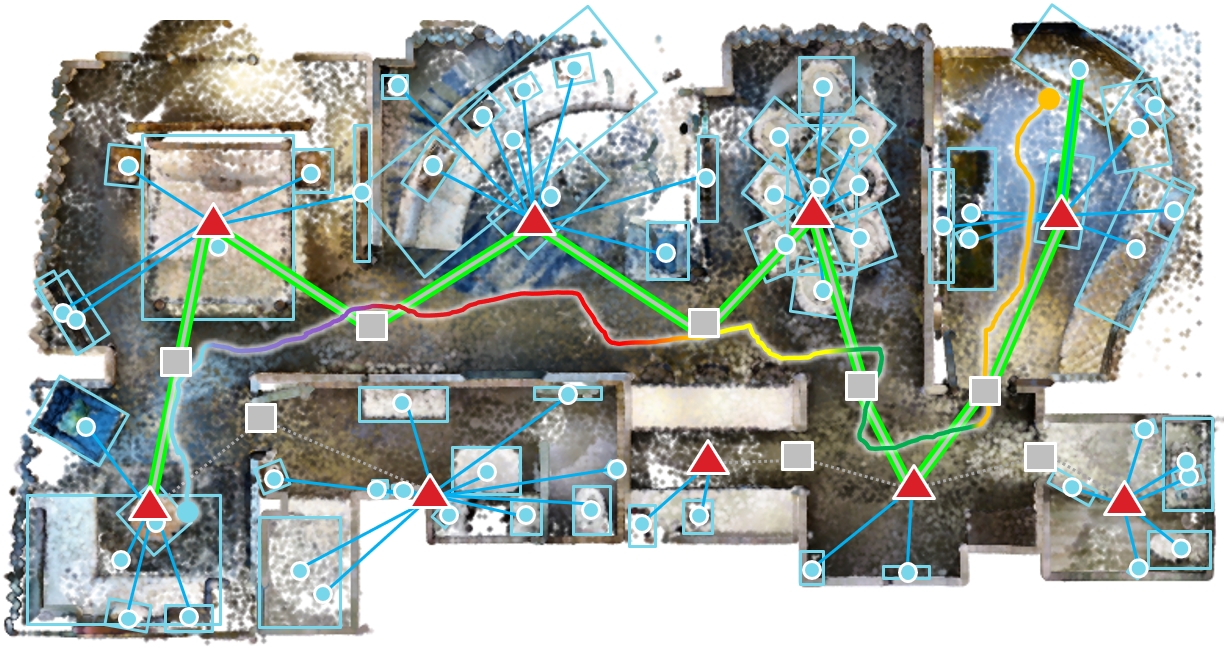 Topo-Field: Topometric mapping with Brain-inspired Hierarchical Layout-Object-Position Fields
Topo-Field: Topometric mapping with Brain-inspired Hierarchical Layout-Object-Position Fields
Jiawei Hou, Wenhao Guan, Longfei Liang, Jianfeng Feng, Xiangyang Xue, Taiping Zeng.
RAL
Webpage •
Code •
Code
 FastOcc: Accelerating 3D Occupancy Prediction by Fusing the 2D Bird's-Eye View and Perspective View
FastOcc: Accelerating 3D Occupancy Prediction by Fusing the 2D Bird's-Eye View and Perspective View
Jiawei Hou, Xiaoyan Li, Wenhao Guan, Gang Zhang, Di Feng, Yuheng Du, Xiangyang Xue, Jian Pu.
ICRA, 2024
Paper •
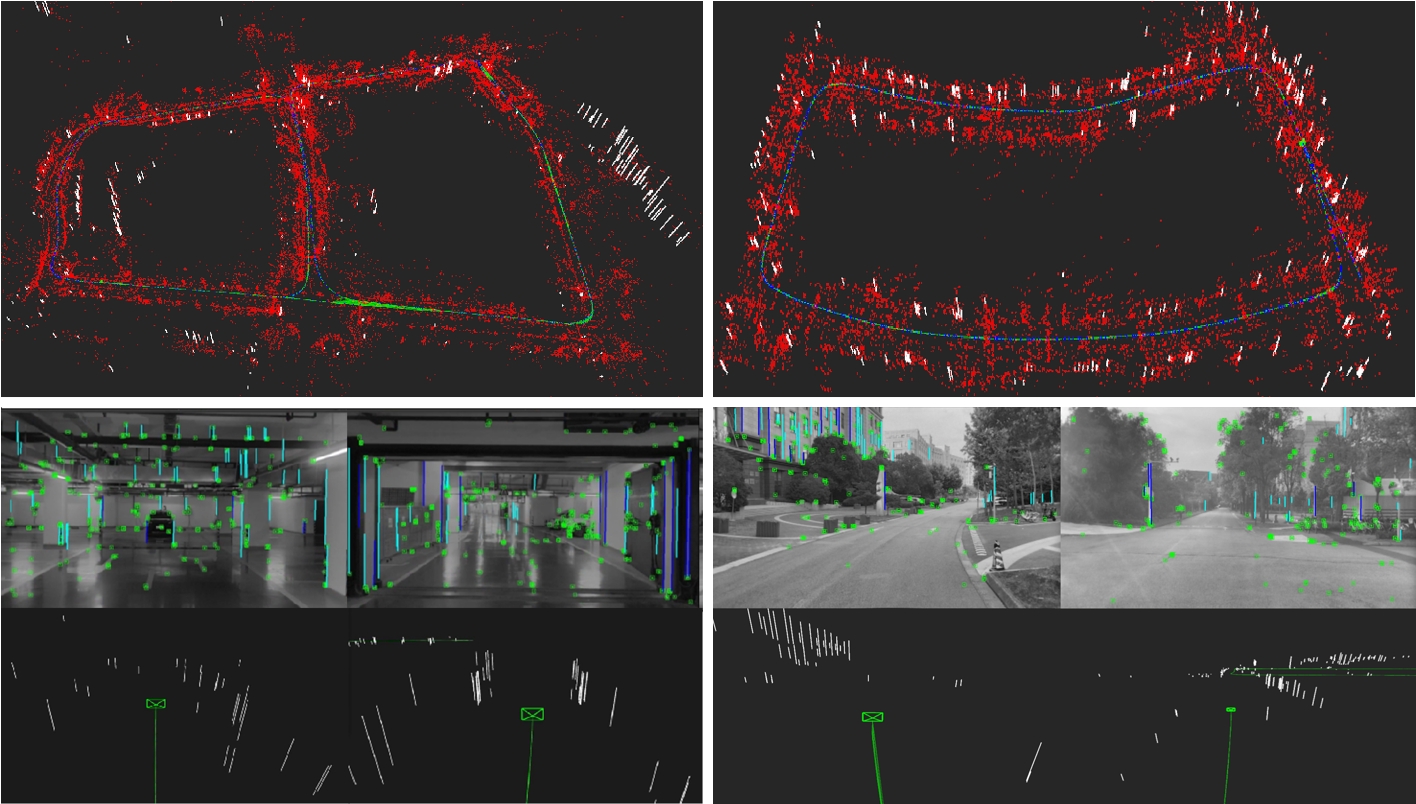 VPL-SLAM: A Vertical Line Supported Point Line Monocular SLAM System
VPL-SLAM: A Vertical Line Supported Point Line Monocular SLAM System
Qi Chen, Yu Cao, Jiawei Hou, Guanghao Li, Shoumeng Qiu, Bo Chen, Xiangyang Xue, Hong Lu, Jian Pu.
T-ITS
Paper •
 A Visual Foundation Model of Image Segmentation for Power Systems
A Visual Foundation Model of Image Segmentation for Power Systems
Nannan Yan, Wenhao Guan, Xiao Yu, Jiawei Hou*, Taiping Zeng*.
IEEECyber, 2024
Paper •
 SUPS: A Simulated Underground Parking Scenario Dataset for Autonomous Driving
SUPS: A Simulated Underground Parking Scenario Dataset for Autonomous Driving
Jiawei Hou, Qi Chen, Yurong Cheng, Guang Chen, Xiangyang Xue, Taiping Zeng, Jian Pu.
ITSC, 2022
Code •
Paper •
Projects
A general mobile manipulation pipeline
Free to be deployed on any emboddiments with a mobile base and robotic arm.
A scene graph generation and efficient planning pipeline
Topo & NeRF based approach with highly efficient planning strategy and detailed scene memory.
Automatic welding of sub-millimeter precision with robotic arms
Deploying computer vision and multi-sensor fusion for welding program with sub-millimeter precision.

Robotic arm precision correction using the motion capture system
Improving the absolute precision of a specific robotic arm with the help of motion capture system and DL methods.

A human-like self-constructed robotic platform.
A self-constructed platform built from scratchwhich is easy to apply self-defined changes for lighting, layout, contents, etc. Used for data generation and lots of perception and SLAM baselines have been tested on it.
An autonomous car playground for data collection and algorithms deployment
A simulation platform which is easy to apply self-defined changes for lighting, layout, contents, etc. Used for data generation and lots of perception and SLAM baselines have been tested on it.
Experience
 Fudan University
Fudan University
School of Computer Science
2021.09 - Present • Ph.D. Student
Research Advisor: Prof. Xiangyang Xue
 Neuhelium Neuromorphic Intelligence Tech.
Neuhelium Neuromorphic Intelligence Tech.
Service Robotics
2023.12 - Present • Head of R&D
Mentor: RSR. Longfei Liang
 YOFO Robot
YOFO Robot
Auto Welding
2024.08 - Present • Head of R&D
Mentor: Dr. Zhenfeng Sun (CEO of YOFO Robot)

 FAW (Nanjing) Technology Development Company Ltd.
FAW (Nanjing) Technology Development Company Ltd.
Mapping and Localization
2021.08 - 2023.10 • R&D Intern
Mentor: Dr. Guang Chen
 Tianjin University
Tianjin University
College of Intelligence and Computing
2017.09 - 2021.06 • Undergraduate student
Research Advisor: Dr. Junhai Xu